Parte daConduçãosecção. Motor + acionamento da correia + montagem do redutor e a entrada primária de vibração / torque para a máquina.
Introdução
Esta subconjunto define a seleção motor/redutor, layout do acionamento da correia e abordagem de montagem/tensão. Ele define as cargas radiais do acionamento (da tensão do cinto), vibração no quadro e o torque de saída redutor que impulsiona o trem de engrenagem.
Principais componentes; as cores podem diferir entre figuras. A intenção principal é especificar interfaces e o que os contratantes devem validar.
Cor( s)
Componente
—
Motor— WEG W21/W22 IE3 motor, produto 13533507: 7,5 kW (10 hp), 50 Hz, 4 pólos, velocidade nominal 1460 rpm, torque nominal ~49 N·m, eixo de 38 mm.
—
Condução de cintos em V— correias SPA; conceito actual utiliza polias 1:1 (170 mm pitch dia motor e redutor). Dois cintos planeados. A distância central e o método de tensionamento são TBD.
—
Redutor— Série Sumitomo Cyclo 6000; velocidade de saída alvo ~70 rpm (razão final/modelo a ser confirmado a partir da seleção do catálogo).
Figuras
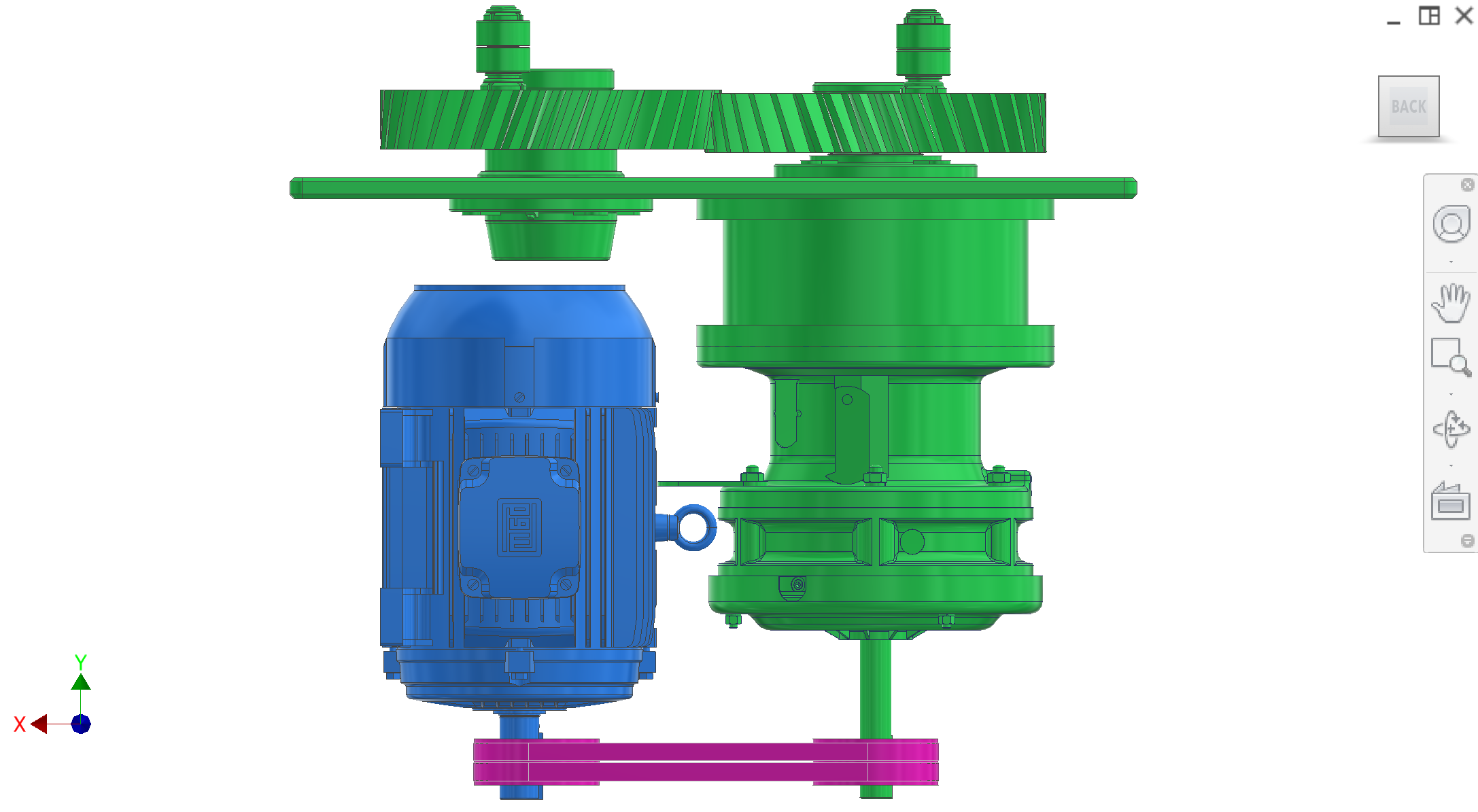
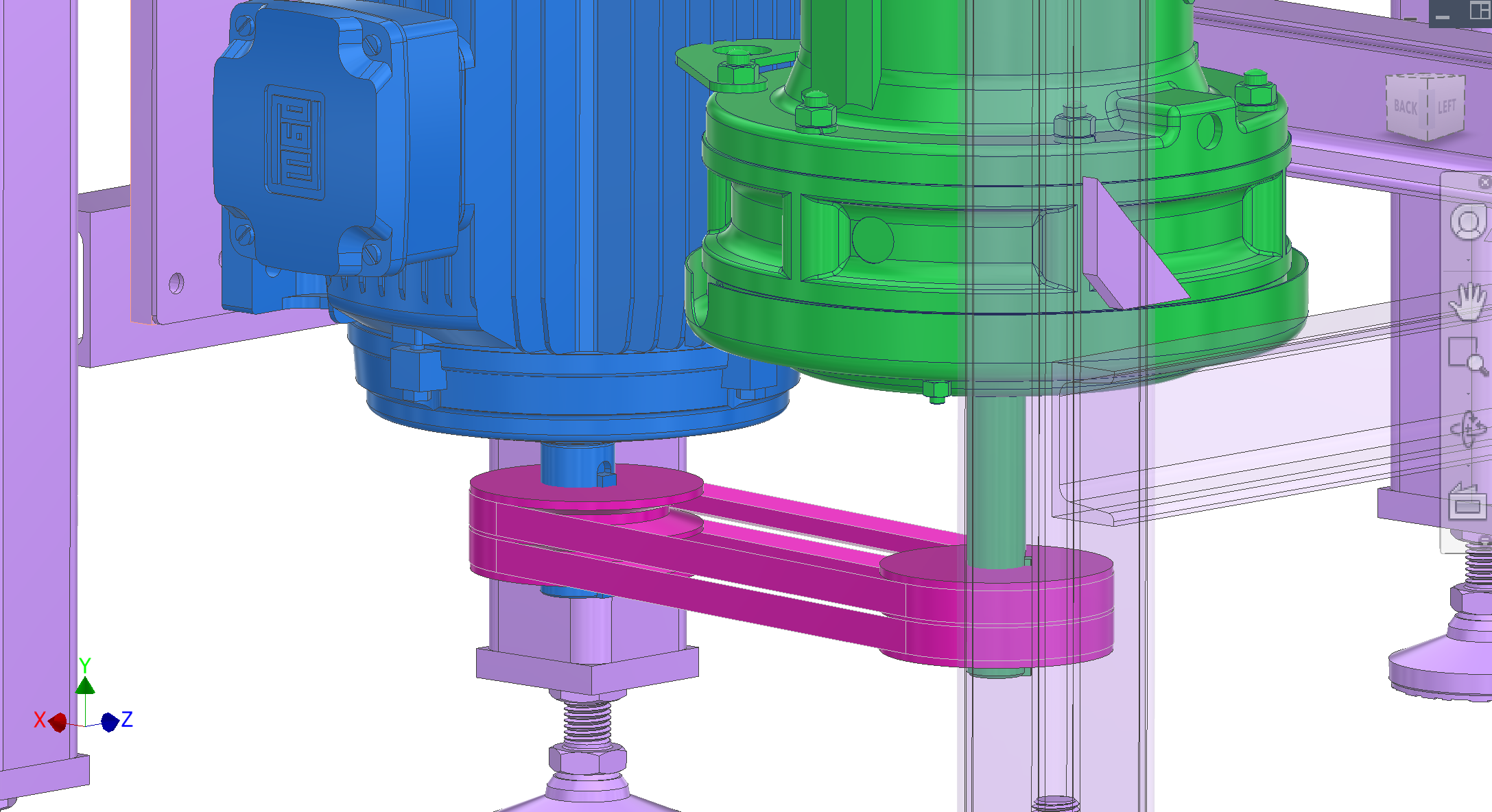
P6 motor/redutor DAC (Figuras 1–2). Figura 3 é afoto de referência de outra máquinaApresentando apenas um conceito de montagem de motor à base de nozes/standoff-estilo para inspiração — não o projeto P6.
Adicionar figura:Mecanismo de tensionamento do cinto— shims, jack screw, ou slide detalhe com dimensões de distância central.
Adicionar figura:Placa de montagem do motor— material final (conceito de madeira vs) e padrão de parafuso para a placa de transmissão.
Adicionar figura:Verificação do alinhamento da polia— método de borda/linha de visão para o escoamento da correia SPA.
Discussão
Desenho e intenção difíceis
Objectivo primário— Forneça um binário de saída de redução estável ao trem de engrenagem, mantendo o tensionamento da correia, o alinhamento da polia e a vibração controláveis.
Orientação de montagem— O conceito actual monta o motor com o seu eixo virado verticalmente para baixo, e o eixo de entrada do redutor também é orientado verticalmente para baixo. Uma correia transfere energia entre estes eixos verticais.
Principal desconhecido— A distância do centro do cinto e o mecanismo de tensionamento devem ser finalizados porque ele estabelece os requisitos de carga radial, vibração e rigidez na placa de montagem.
Motor de referência + especificações redutoras (50 Hz vs 60 Hz)
Algumas especificações legadas foram para mercados de 60 Hz. A linha de base da China é de 50 Hz. Os números do modelo do redutor abaixo são de uma lista de custos anterior e devem ser confirmados (algumas notas sugerem 6145 vs 6165).
Item
50 Hz (início da China)
60 Hz (referência)
Motor
WEG W22, 10 cv, 4 pólos, ~1470 rpm; 220/380/440 V 3 fases; IPW55; V5T eixo vertical para baixo
WEG W22, 10 hp, 4-pole, ~1760 rpm; 220/380/440 V 3-phase; IPW55; V5T eixo vertical para baixo
Redutor
Sumitomo Cyclo Drive CWVJ-6165-21 (i) 21-70 rpm; flangeado, vertical, eixo de saída para cima (TBD)
Sumitomo Cyclo Drive CWVJ-6165-25 (i) visando ~70 rpm; flangeado, vertical, eixo de saída para cima (TBD)
Cálculo do cinto de referência (da ficha de trabalho interna anterior — deve ser validado)
Os seguintes valores são copiados de um cálculo interno anterior/placa de trabalho para P6 870 (China, 50 Hz). São fornecidos como ponto de partida para os contratantes —não suponha que eles estão corretos. O contratante deve voltar a verificar a seleção da correia, a classificação da potência, os pressupostos do ângulo de envoltório, o método de tensionamento e as cargas radiais resultantes do eixo/comprimento.
Factor de serviço: 1.3 (input da folha de trabalho)
Motor: WEG W21 Multimounting IE3, PN 1353307, 7,5 kW, 50 Hz, 4-pole, 1500 rpm síncrono, 1460 rpm avaliado, 380/660 V, 14.6./8.41 A, 49.03 Torque nominal N·m, eixo de 38 mm
Cinto: Perfil SPA, embrulhado; relação 1:1; diâmetros de pitch 170 mm / 170 mm; velocidade do cinto alvo ~13 m/s
Distância central: tentativa ~340 mm (folha de trabalho)
Cintos necessários: 2 (resultado da planilha; nota: um cálculo manual mais antigo assumiu 3 correias bandadas)
Principais saídas da planilha (referência do método Gates/ISO 4184)
Parâmetro
Valor da planilha
Notas / validação necessárias
Comprimento padrão do cinto
1250 mm
Escolhido mais próximo do comprimento experimental (~1214 mm). Confirme a disponibilidade e as tolerâncias de distância do centro da polia.
kW líquidos por cinto
6.78 kW
Depende de tabelas, alvo de vida, ângulo de enrolamento e correções (arc/contato, comprimento). Recalcular para geometria final.
# cintos necessários
2
Validar contra o ciclo de serviço, fator de serviço, horas de vida e ângulo de envoltório; considerar cintos bandados para choque/vibração.
Subsídio de instalação
25 mm
Diminuição mínima da distância central para instalação; se não for possível, a planilha sugere ocioso/tensionador.
Tensão estática por cinto
~226 N
Fortemente dependente do ângulo de envoltório e do método de tensionamento. Aciona cargas radiais de eixo/comando.
Força de deflexão recomendada (total)
~18.5–27.5 N
Como relatado; confirmar método e se multiplicado pela contagem do cinto corretamente.
Notas de cálculo manuais mais antigas (ainda mais tentativas)
Um cálculo manual mais antigo (notas somente) assumiu 3 faixas de cintos, distância central ~344 mm, força tangencial da correia ~577 N, e uma carga radial relatada no motor ~961 N. Trate-os como placeholders ásperos; valide-os com ângulo de envoltório final, coeficiente de atrito, razão de tensão, e se um ocioso é usado.
Problemas e riscos conhecidos
Cargas radiais da tensão do cinto— O contratante deve quantificar a tensão do cinto e as cargas radiais resultantes nos eixos motor e redutor.
Vibração— As vibrações do motor/redutor transmitem para o quadro; deve considerar-se a rigidez e o amortecimento/isolamento do suporte.
Extensões de eixo— A disposição da máquina exige a extensão dos eixos de entrada/saída do redutor; o contratante propõe uma extensão/abordagem de adaptação segura e manufacturável e tolerâncias.
Guarda de cintos não concebidos— É necessária uma polia/guarda de cintos; podem ser necessários trilhos/estruturas de montagem na parte de trás da máquina para apoiar a guarda.
Proteção a jusante (limitador de torque)— Não temos certeza se o redutor de ciclo Sumitomo deve incluir/receber uma estratégia de limitação/sobrecarga de torque para proteger componentes a jusante (comboio de rede, rolamentos de came) durante baias ou eventos de engarrafamento; contratante para recomendar.
DFM e fabricação (China)
Montagem— Recomendar uma montagem de motor/redutor que suporte fácil tensão da correia e verificação de alinhamento da polia.
Guarda— Forneça uma polia/guarda prática que seja segura e removível para manutenção.
Conceito de tensionamento— o conceito de proprietário actual é um "standoff stud ajuste" montagem: motor senta-se em múltiplos through-studs / parafusos com porcas empilhadas / lavadoras (noz abaixo da placa, porca / máquina de lavar acima da placa, pé motor, porca acima do pé) para que a posição do motor pode ser ajustada para a tensão do cinto. Esta abordagem deve incluir uma estratégia de bloqueio para que a tensão não se desloque sob vibrações.
Especificação do cinto — apoio ao contratante exigido
Queremos que o empreiteiro lidere a seleção e validação do cinto. Existem cálculos internos anteriores, mas não são tratados como corretos; use-os apenas como ponto de partida.
Restrição CAD atual— distância central entre o eixo de saída do motor e o eixo de entrada do redutorno máximo 340.311 mm quando tensionado, e menor quando sem tensão (posição de instalação).
Sem ocioso— utilização do conceito actualsem polia ociosa/tensionária; A tensão do cinto é definida pela posição do motor (ajustamento de porca/standoff).
Razão— 1:1 polias (conceito) e um motor de 50 Hz linha de base; o contratante pode propor alternativas se melhorar a fiabilidade/servibilidade.
Perguntas para o contratante
Seleção do cinto: Selecione o perfil da correia e a contagem da correia para o tamanho da polia final e velocidade, usando um fator de serviço definido e alvo de vida. Fornecer a base de cálculo (quadros/padrão) e mostrar margens.
Comprimento e distância central: Selecione acomprimento padrão da correiaque é compatível com distância central ≤ 340.311 mm (tensionada) e proporciona folga/viagem suficiente para instalação sem ocioso. Especifique a viagem de ajuste necessária.
Objectivos de tensão + procedimento: Fornecer tensão estática/instalação recomendada (e um procedimento de campo) compatível com nosso método de tensionamento porca/standoff (por exemplo, método de força de deflexão, método de frequência, etc.).
Cargas radiais: Calcular cargas radiais em eixos/reboques do motor e do redutor da tensão da correia através da tensão min/max, e confirmar aceitabilidade vs motor/redutor ratings de rolamentos e desalinhamento esperado.
Bloqueamento + deriva: Propor uma estratégia de bloqueio para o ajuste de porca / standoff para que a tensão e alinhamento do cinto não derrapem sob vibração (e definir intervalos de inspeção / retensão).
Fontes de abastecimento da China: Fornecer opções de fornecimento de correia e polia disponíveis na China (e substitutos aceitáveis), com tempos de chumbo e peças de reposição recomendadas.
Confirme o modelo exato do ciclo 6000/razão necessária para a saída de ~70 rpm e forneça requisitos de montagem/lubrificação.
Avaliar se especificar umlimitador de torque / proteção contra sobrecargano ciclo (ou num regime de protecção equivalente) para proteger os componentes a jusante. Fornecer configurações recomendadas e trade-offs.
Propor um plano prático de lubrificação/manutenção para o motor/cinta/redutor: o que é lubrificado, tipo de lubrificante recomendado, intervalo de inspeção e como a manutenção é realizada com segurança na fábrica piloto.
Propor a extensão do eixo de entrada e saída / projeto(s) de adaptador (materiais, classes de ajuste, chaveamento / splines, alvos de escoamento) e um plano de montagem / inspeção.
Avaliar uma arquitetura alternativa: montar o motor em uma orientação convencional e usar uma caixa de velocidades de ângulo direito/ângulo para conduzir a entrada do redutor vertical. Isso melhoraria a vibração, o serviço ou a segurança? Fornecer trade-offs e opções de fornecimento.
Propor um conceito de guarda para o cinto / pulleys que pode ser montado na parte de trás da máquina (que trilhos / brackets são necessários e como é removido para manutenção).
Interfaces e tolerâncias
Interfaces e tolerâncias conhecidas. As ligações vão para subsistemas relacionados.
Parte
Interface / tolerância
Relacionado
Motor
WEG W21/W22 IE3, 7,5 kW, 1460 rpm nominal; eixo de 38 mm (forma de montagem/frame confirmado a partir do modelo seleccionado)
—
Condução de cintos em V
Cintas SPA; conceito 1:1 polias (170 mm pitch dia); duas correias planejadas; distância central e tensionamento TBD
—
Redutor
Série Sumitomo Cyclo 6000; selecione relação/modelo para atingir a velocidade de saída alvo; confirme a geometria do eixo de saída e montagem
—
Montagem
Motor + montagem redutor para a placa de montagem do drivetrain; requisitos de alinhamento e rigidez por quadro / drivetrain